Research Summary
My main research interests lie within the scope of space engineering, attitude and orbital control systems (AOCS), control systems, guidance & navigation, mechatronics, robotics, and artificial intelligence.
The enthusiasm about computer engineering and the passion about building a computer software to simulate natural phenomena, then, implement these into different applications from robotics, spacecraft, rockets, and fluid dynamics.
During my bachelor degree, I have been contributing positive impacts in each institution I work for. Primarily, at Cairo University, we initiated a rover team and participated in the University Rover Challenge (URC) at the Mars Desert Research Station. In my first year, as R&D undergrad student, I designed the separation mechanism with its circuit for the rover. Then, I was responsible for the communication and control system during participation in URC 2014. In addition, I tested a one DOF quadcopter to estimated its parameters based on hardware-in-the-loop. During this time, I have gained the essential experience for implements digital control theories in embedded systems. Moreover, I built an RC airplane with a wing span 1.8 m for a competition between the students at the Unmanned Aerial Systems Development Center (UDC).
At Istanbul Techincal University, I participated in the rocket team to implement and fabricate electronic circuits to control and communicate with the rocket during the launching based on algorithms for each specific scenarios. Then, I worked on the AOCS of a 1U CubeSat "Virtual Sat" to provide a virtual headset experience as an astronaut around the earth under the supervisor Prof. Dr. Alim Rüstem ASLAN. Later, the ITU Space Systems Design and Testing Laboratory (SSDTL) gave me the opportunity to design a modular rocket for CanSats to be used for the CanSats workshops held in Turkey.
Interests
- Space Systems
- Spacecraft Dynamics and Control
- AOCS
- Control Systems
- Embbeded Systems
- Mechatronics, and Robotics
- Artificial Intelligence
Research Projects
-

The current study focused on design and analysis of a modular CanSat rocket intended to reduce the cost of the modular rocket, which is reusable and carry a payload consists of two CanSats, and it is powered by a solid propellant rocket motor, which is a commercial type to reduce the total cost and complexity. The majority of the emphasis was placed on the design of the motor case and the separation mechanism. This work was done as a proof of concept that separation mechanism can be based on a mechanical system, which detects rocket apogee using magnetometer. Moreover, the motor case and body type of the rocket designed to fit two different dimensions of a motor diameter, which provides different maximum altitude. The study being with the mission design requirements are given to be consistent with standard dimensions of the CanSat. Then, a background about the commercially available modular rocket in the market. Then, a review study for the rocket dynamics and aerodynamics of flying conditions is introduced.
-
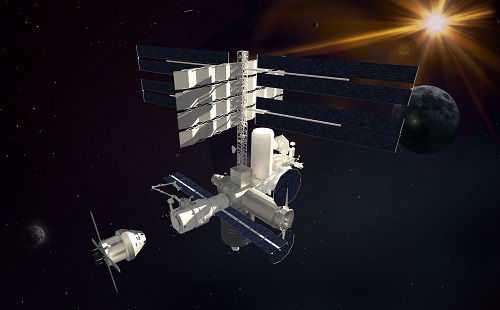
Prometheus Programme
Establish a Space Station to enable utilization of lunar resources as a foundation for further expansion of human presence into space. Provide a long term, manned cis-lunar habitat utilizing ISS expertize and technology.
-
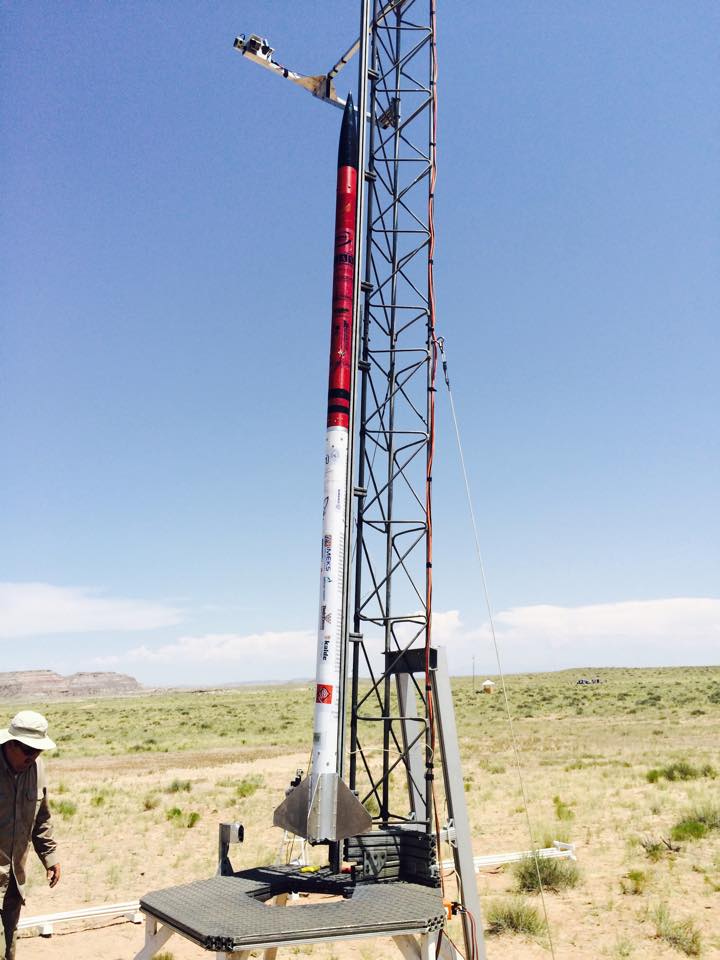
The ITU Rocket team designed a rocket for the Experimental Sounding Rocket Competition, which is hosted by the Experimental Sounding Rocket Association (ESRA) in Utah state.
-

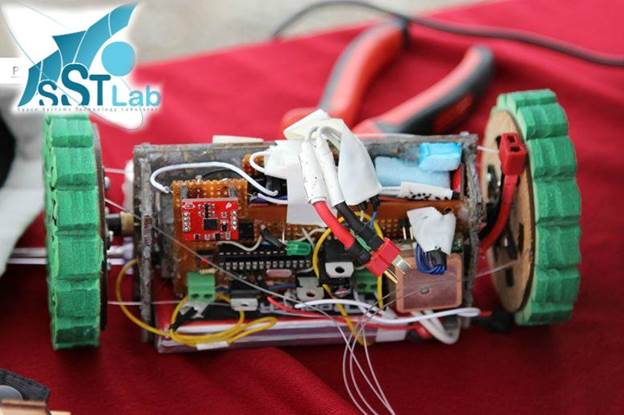
The SSTLAB First Space Rover for the University Rover Challenge Competition, it was the first Rover to participate from the Middle-East and Africa, which was ranked 9th out of 31st teams, USA, 2014.
-
Rover-Back CanSat which was participated in ARLISS 2014 Competition in Nevada, USA, 2014. Rover for ARLISS the ComeBack Competition
-

Robot for the Angry Birds Competition
-

The project was to design a CanSat for the Iranian CanSat Competition for the classic category which includes Atmospheric Sounding and Photo/Video Capturing missions. The design constraints were to be a cylinder 66 mm in diameter and 115 mm in height with maximum mass of 350 gr. The data of atmospheric parameters included temperature, pressure, and humidity, compass heading, acceleration, and its location (longitude, latitude, and altitude) based on a GPS module. Then transfer this data to the ground station in real-time and visualize it. During the Photo/Video Capturing mission, the CanSat provided a video record for the flight duration.
-

It was a part of Robotics Olympics, which organized by IEEE-CUSB chapter, aims to provide the faculty of Engineering graduates with world-class experiences in the field of robotics and embedded systems. The project started at 8/5/2012 with an intensive training for one month to provide technical seminars in programming and designing robots. Angry Birds Contest was held at 22/8/2012, with two rounds, The first round was at 13/9/2012 and the second round was at 9/10/2012. The contest was to design an automatic launcher for the birds using motors and micro-controllers and any other thing needed. The team was consist of 6 members.
-

Radio astronomy based on the RTL-SDR receiver for a personal use
-